Photoneo - 간단한 3D 피킹(picking) 어플리케이션을 위한 새로운 방법
2023-09-06Locator Studio - 간단한 3D 피킹(Picking) 어플리케이션을 위한 새로운 방법
평평한 바닥 위의 움직이는 물체를 집는 정도의 간단한 작업을 자동화하고 싶으신가요?
이정도 난이도의 작업을 위한 것이라면 세밀한 경로설정 및 알고리즘까지 갖춘 bin picking solution까지 필요하지 않습니다.
로봇 주위에 높은 벽이나 이동 시 충돌위험 없는 평평한 표면 위에서 물체를 집는 것이라면 최신 3D비젼을 적용한 간단한 솔루션 만으로도 해결할 수 있습니다.
이렇게 간단한 솔루션을 적용하면 더 빠르게 작업할 수 있고, 보정과 설정도 쉬워지고 기능을 단순화 할 수 있는 등의 장점이 있습니다.
자동화된 bin picking은 관련된 복잡성 때문에 매우 어려운 기술적 과제로 여겨집니다.
"눈 앞의 성배" (Holy Grail in sight)라고 불리기도 하죠.
우리는 여러분이 가장 까다로워하는 bin picking 어플리케이션을 완벽히 숙달할 수 있도록 심혈을 기울여 강력한 로봇지능 솔루션을 개발했습니다.
바로 Bin Picking Studio 입니다.
그러나 매번 bin picking solution처럼 정교하고 복잡한 솔루션이 필요한 것은 아닙니다.
때론 기초적이고 간단한 시스템만으로도 충분히 해결할 수 있는 어플리케이션이 있죠.
높은 난이도의 bin picking 어플리케이션을 위한 복잡한 솔루션은 꽤 많지만, 오히려 빠르게 물체 위치를 파악하고 충돌 없는 피킹(picking)을 위한 간단한 시스템은 없었습니다.
이 때문에 Photoneo는 간단한 어플리케이션을 위한 3D picking 도구인 Locator Studio를 개발했습니다.
이 새로운 Locator Studio는 기존의 검증된 기술적 원리를 토대로 작동하지만 단순성은 기존 bin picking solution보다 빠른 속도, 손쉬운 보정과 구성 및 작동, 특별한 기술이 없어도 손쉽게 사용할 수 있는 등의 많은 이점을 제공합니다.
Locator Studio의 주요 장점을 요약하면 다음과 같습니다.
* 충돌 없는 환경에서 매우 빠르고 간단한 3D 피킹(picking)
* 물체 바로 위 혹은 로봇 팔에 부착된 Phoxi 3D 스캐너나 MotionsCam-3D를 통한 빠른 스캐닝 속도와 우수한 품질의 3D 포인트 클라우드 제공
* 웹을 통한 간편한 캘리브레이션과 설정
* 이전 물체를 picking하는 동안 다음 물체를 단 한 번의 스캔으로 CAD기반의 강력한 위치 데이터 제공
* TCP/IP를 통한 대부분의 모든 로봇 시스템과의 빠른 통합
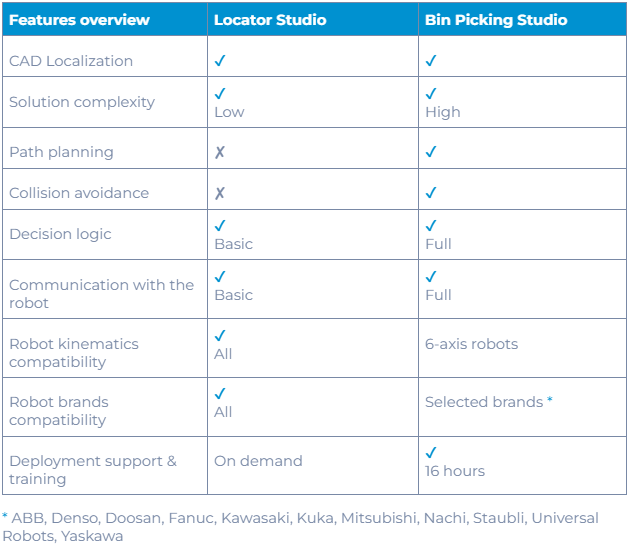
고성능의 Bin Picking Studio와 간단한 Locator Studio와의 차이점을 더 잘 이해하고 싶다면 아래의 표를 참고하세요.
Applications - Locator Studio를 사용할 조건과 환경
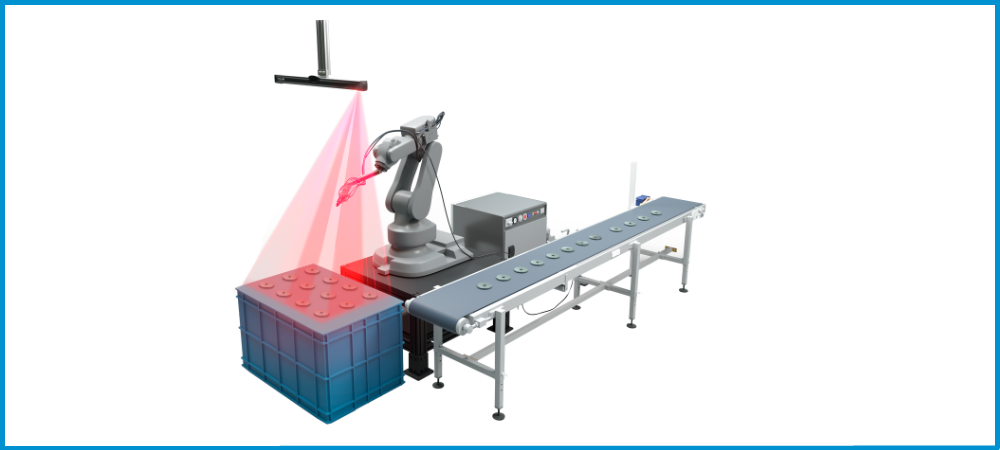
Locator Studio는 충돌 없는 환경에서 특정방향으로 이동하는 물체를 집어야 하는 모든 상황에서 사용할 수 있도록 기존 2D나 2.5D application을 업그레이드 합니다.
충돌 없는 환경이란 쟁반, 에어캡, 얕은 통, 정지 및 이동하는 컨베이어 벨트나 랙과 같이 충돌 위험이 없는 평평한 표면을 말합니다.
Picking 외 지원하는 application으로는 조립이나 나사 고정, 정밀한 부품의 배치를 위한 delayering, destacking, deracking 또는 부품의 위치 확인 등이 있습니다.
Locator Studio는 Phoxi 3D 스캐너 및 MotionCam-3D와 함께 사용할 수 있습니다.
또한 사용자 선호도와 application 상황에 맞게 직접 비전장비를 보정할 수 있습니다.
시스템이 picking하는 방향이나 벡터를 정의할 수 있는 기능이 기본제공되어 추가작업 없이도 원하는 순서나 방향대로 부품을 선택할 수 있다는 점 또한 큰 장점입니다.
기술 호환성
Locator Studio는 TCP/IP 프로토콜을 통해 모든 장치와 통신하므로 이더넷만 있으면 사용할 수 있습니다.
개방된 프로토콜이 철저하게 문서화되어 있기 때문에 모든 로봇 브랜드나 산업용 조작기와 통합할 수 있으며, 이를 통해 Locator Studio는 진정한 만능 스튜디오가 됩니다.
TCP/IP 인터페이스는 임의의 컨트롤러나 사용자 설정이 되어있는 PC 또는 PLC와 같은 중간 장비를 통해 비전 컨트롤러와 로봇 컨트롤러를 연결해줍니다.
이것은 새로운 기능입니다.
이전 방식은 스캐너를 비전 컨트롤러와 연결하고 비전 컨트롤러를 로봇 컨트롤러에 연결하는 것이었습니다.
Bin Picking Studio가 6축 로봇만 지원하는 데 반해 Locator Studio는 호환성에 제한이 없습니다.
Locator Studio는 더 유연하고 보편적인 SCARA, DELTA 또는 팔레트 로봇과 같이 높은 자유도를 가진 고관절 로봇이나 7축 시스템에서 사용할 수 있습니다.
작동 방식
Bin Picking Studio와 마찬가지로 Locator Studio도 두 가지 방법으로 보정(Calibration)할 수 있습니다:
1) 일반적으로 통(bin)위에 있는 로봇 셀의 고정된 위치에 스캐너를 장작하는 외부 보정방식
2) 로봇 팔(arm)에 스캐너를 직접 장착한 상태에서 사용자의 손과 눈으로 보정하는 방식
외부 보정 시 사전에 측정된 크기의 볼을 로봇 팔(arm)의 끝점 또는 그리퍼(gripper)에 부착하여 사용합니다.
손과 눈으로 보정하는 것은 패턴이 있는 보정 보드를 사용합니다.
보정 프로세스는 로봇이 특정 자세를 취한 상태에서 스캐너가 보정 볼이나 보드를 볼 수 있는 여러 지점을 추가하는 것으로 구성됩니다.
사용자는 Locator Studio의 웹 GUI를 통해 보정 지점을 추가할 수 있습니다.
또한 각 자세마다 로봇의 TCP정보를 제공해야 합니다. 반자동 보정을 선택하면 TCP정보도 제공하는 전용 로봇 호출을 통해 로봇이 직접 포인트를 추가합니다.
필요한 만큼의 포인트를 추가한 후 보정 정확도와 매트릭스가 계산되어 비전시스템에 저장됩니다.
이렇게 보정에 성공하면 물체를 피킹(picking)할 준비를 마칩니다.
로봇이 물체의 위치정보를 요청하는 것으로 프로세스가 시작하는데, 이 요청에 따라 비전시스템은 스캔을 수행하며 스캔은 Vision Controller에서 직접 포인트 클라우드로 처리됩니다.
이후 실시간으로 CAD데이터로 변환되어 각 물체의 위치는 X,Y,Z좌표의 형태로 이더넷을 통해 전송됩니다.
스마트 메모리기능과 다양한 형태의 그리퍼(gripper)덕분에 시스템은 여러 모양의 부품의 위치를 확인하고 동시에 피킹(picking)할 수 있게 되었습니다.
이 기능은 기존의 bin picking solution에서는 찾을 수 없던 것입니다.
Locator Studio 1.0.0버전은 주로 vacuum이나 magnetic gripper를 고려하여 디자인되었기 때문에 충돌회피 기능을 제공하지 않으므로 기계적으로 gripper와 부품의 충돌을 방지할 수 없습니다.
또한 Locator Studio는 기존의 전통적인 picking 기술로 작동되는데, 이는 새로운 프로그래밍 언어를 배울 필요가 없다는 것을 의미합니다.
하지만 많은 프로세스가 로봇 쪽에서 실행된다는 점에서 사용자가 로봇 프로그래밍에 대한 지식이 있다면 활용면에서 시너지 효과는 매우 클 것입니다.