Photoneo - 픽 앤 플레이스(Pick & Place) 공정
2023-02-16
픽 앤 플레이스 (Pick & Place) 공정에서
로봇은 어떻게 동작 하는가
최근에는 대부분의 생산 현장에서 많은 종류의 로봇을 볼 수 있습니다. 이러한 로봇들은 수없이 많은 비즈니스에서 생산 공정 전체를 아울러 적용되어지고 있습니다.
픽 앤 플레이스(Pick & Place)는 이러한 로봇 사용 사례 중 하나 입니다. 이 작업은 특정 영역에 있는 물체를 사용자가 정의 해 놓은 다른 장소로 이동 시키는 것 입니다. 이 작업을 통해 제품의 생산 공정 속도를 굉장히 빠르게 만들 수 있습니다.
이 블로그 글에서는 Pick & Place에서 로봇이 어떤 역할을 하는지 알아보겠습니다.
Pick & Place 로봇이란 무엇인가?
Pick & Place 로봇은 물류창고와 생산 공장에서 가장 많이 볼 수 있는 산업용 로봇입니다. 이 로봇은 아래의 작업을 통해 공정을 돕습니다.
* 박스로부터 제품을 꺼내기
* 제품을 박스에 넣기
* 제품을 특정 위치에서 다른 위치로 혹은 지정된 저장 공간으로 이동시키기
로봇 팔(Arm)의 끝단에는 사람의 손과 같이 여러가지 종류의 물체를 집을 수 있는 End effector 가 장착됩니다. 이 End effector에는 제품의 생산 공정을 위해 추가적인 부품이 장착될 수 있습니다.
Pick & Place 로봇은 무엇을 하는가?
조금 더 자세하게 설명하자면, Pick & Place 로봇은 대체로 하기의 작업을 수행합니다.
* 박스나 컨베이어 벨트로 이동 시켜야 하는 각기 다른 사이즈와 모양의 제품을 집어 냅니다. (Picking)
* 무작위로 쌓여 있는 제품을 창고 내의 다른 장소로 이동 시킵니다
* 조립 – 작은 제품을 플랫폼 위로 이동 시켜 함께 다음 공정으로 이동할 수 있도록 합니다.
* 그 밖에 많은 어플리케이션
Picking 절차
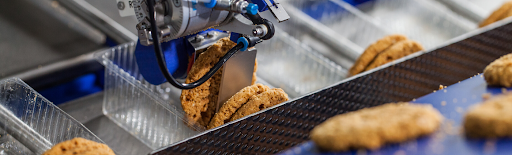
(Photo courtesy of PWR Pack)
Pick & place 로봇은 굉장히 넓은 영역에 사용될 수 있습니다. 어플리케이션의 요청 사항에 따라 여러가지 종류의 End effector를 장착할 수 있습니다.
가장 보편적인 것으로는 석션 컵이 있는 흡착식 그리퍼 (vacuum gripper), 핑거 그리퍼 (finger gripper), 발톱형 그리퍼(clawed gripper), 마그네틱 그리퍼(magnetic gripper) 그리고 커스텀 그리퍼(custom gripper)가 있습니다.

경우에 따라 유연성이 높은 레벨의 시스템을 만들기 위해 여러 개의 로봇 팔(arm)과 헤드(end effector)를 사용하기도 하며 이를 통해 시간 지연 없이 여러 각도에서 물체로 접근할 수 있게 합니다.
Pick & Place 로봇은 제조 라인에서의 모든 생산 공정을 획기적으로 개선 시킬 수 있습니다. 이를 통해 생산 시간을 빠르게 할 수 있으며 또한 생산에 필요한 공간도 절약할 수 있습니다.
예를 들어, 컨베이를 사용하는 시스템의 경우 특별한 목적을 위해 다른 종류의 제품이 이동하게 됩니다. Pick & Place 로봇은 특정 부품을 집어 낼 수 있도록 프로그램 할 수 있습니다. 즉, 특정 모양 혹은 색상의 제품을 집어서 사용자가 원하는 위치로 빠르게 이동 시킬 수 있는 것입니다.
제조공정에서의 Pick & Place 로봇
여러 개의 로봇 팔(arm)에 suction cup 혹은 vacuum 방식의 그리퍼를 사용하는 경우 Picke & place 로봇은 조립 공정을 비롯한 넓은 영역의 제조 공정을 자동화 할 수 있도록 해 줍니다. 여러 개의 로봇 팔을 이용하여 한 번에 여러 개의 물체를 집을 수 있으며 크기가 작은 물체부터 큰 물체까지 모두 커버 할 수 있습니다. 즉, 생산라인에서 여러가지 다양한 물체에 대해서 생산을 자동화하기에 적합하다는 것입니다.
예를 들어, 첨단 기업들은 때때로 다른 사이즈와 다른 모양의 부품들을 함께 생산하곤 합니다. 비슷한 예로 자동차 생산 업체들은 크기 가 큰 SUV와 소형차를 함께 생산합니다. Pick & place 로봇은 수많은 종류의 제품을 빠르고 효율적으로 다룰 수 있도록 해줍니다.
머신비전을 장착한 Pick & place 로봇

(Photo courtesy of PWR Pack)
앞서 얘기한 모든 작업을 수행하기 위해서 로봇은 볼 수 있어야 합니다. 3D 비전은 정확한 식별과 안정적인 제품의 Picking을 위해서 꼭 필요합니다. (이러한 비전 솔루션이 없다면 로봇은 장님이나 다름없습니다) 현재 시장에는 다양한 3D 비전 기술이 있습니다. 포토네오 (Photoneo)의 3D 스캐너와 3D 카메라는 다양하고 혹독한 산업 환경에서도 안정적으로 작업을 수행할 수 있습니다.
포토네오의 PhoXi3D 스캐너는 정지된 상태의 물체에 대한 높은 해상도와 높은 정밀도의 3D 이미지를 제공합니다. MotionCam3D의 경우 빠르게 움직이는 물체에 대해서도 3D 스캔이 가능 합니다.
사용자께서는 어플리케이션에 적합한 3D 솔루션을 제안 받고 싶으시거나 상담 혹은 테스트가 필요 하실 때 ㈜화인스텍으로 연락 주시면 성심껏 지원 드리도록 하겠습니다.
출저: By Andrew Lightstead
https://www.photoneo.com/how-pick-and-place-robots-work